VGGNet, ResNet, MobilNetV2
- Image Classifciation 을 위한 딥러닝 모델
- Object Detection 등과 같은 다른 Task를 위한 모델의 Backbone 모델로 많이 사용된다.
VGGNet
Keywords : Deeper Network, 3x3 kernels
-
이전 모델에 비해 더 많은 Layer를 사용하였다. (Deeper Network)
-
필터의 크기를 3x3으로 설정하여 (최소 단위) 네트워크를 더 깊게 구성 할 수 있도록 한다.
-
3x3 으로 설정하는 이유는 3x3이 상하좌우 위치 정보를 인식 할 수 있는 최소 단위이다.
-
3x3 커널을 3번 적용하는 것과 7x7 커널을 1번 적용하는 것의 결과 feature map의 크기는 동일하다.
-
하지만, 파라미터 계산 수를 계산해 보면 3x3을 3번 적용하는 것이 더 적은 파라미터를 요구한다.
- (3*3)3 = 27 vs 77 = 49
-
-
-
(Conv)+ ReLU + Pooling 구조로 이루어져 있다.
-
레이어 개수를 점점 늘려가며 실험을 해서 레이어의 깊이에 따른 성능을 비교했다.
- 그 결과, 작은 필터로 깊게 설계하는 것이 더 성능이 좋았다는 결론
ResNet
Keywords : Vanishing Gradient, Skip Connection, Bottleneck
-
깊이를 더 깊게 설계 하고 싶지만 오히려 성능이 떨어지는 문제가 발생 (Vanishing Gradient)
- 레이어가 반복될 수록 back propagation 과정에서 gradient 값이 점점 0에 가까워지는 현상
- Activation Function 등에 의해 발생
-
Skip conncetion을 통해 기존 정보를 보존한다.
-
수식적으로는
-
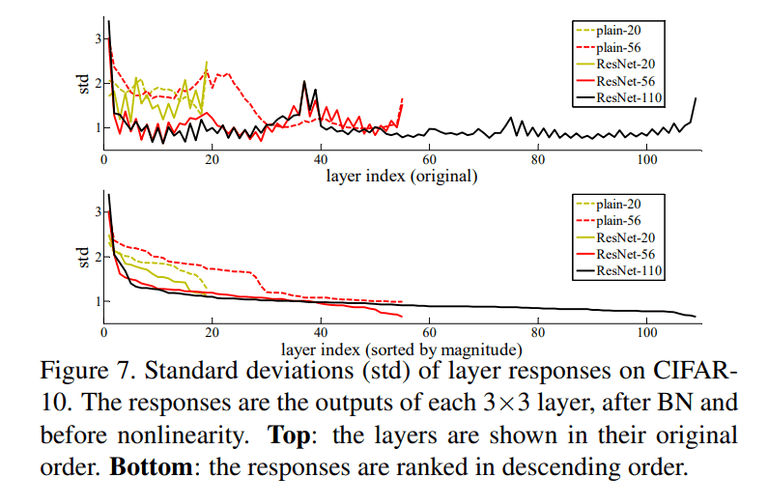
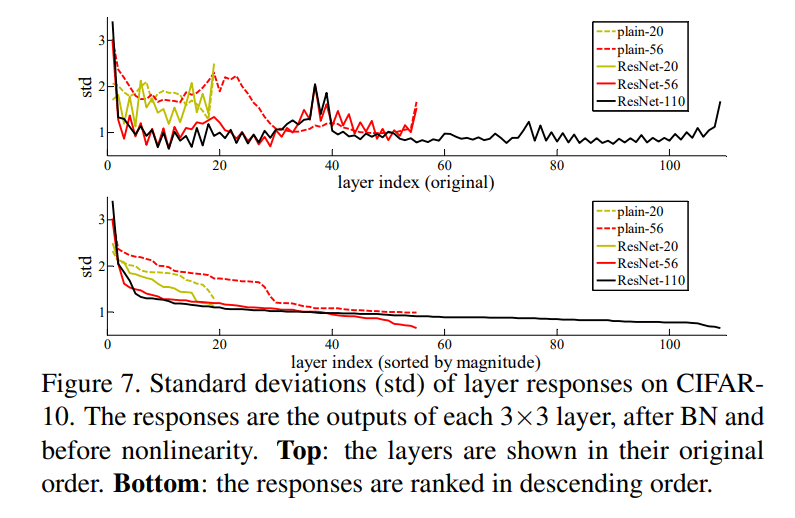
이상적인 함수가 Identity일 때 특히 학습이 쉬워진다
- 이는 실험에서 F가 대부분 매우 작은 값을 가졌다는 것을 보이며 H(x)가 Identity에 가까운 경우가 많으며 따라서 더 최적화가 쉬워진다고 주장한다.
-
-
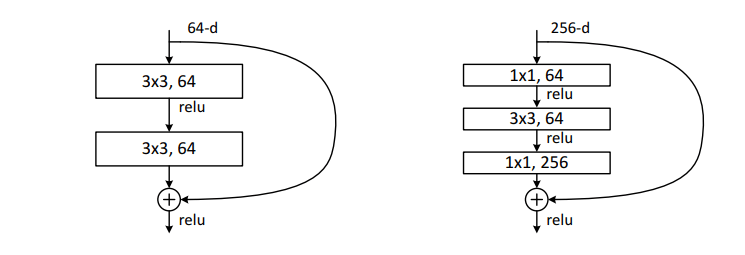
Bottleneck 구조
- 더 빠르고 효율적인 모델을 위해 Bottleneck 구조를 통해 연산량을 줄여준다. (오)
MobileNetV2
Keywords : Depthwise Convolution (Computation) Inverted Residual (Memory)
-
모바일 및 임베디드 환경에 맞출 수 있는 모델 설계
-
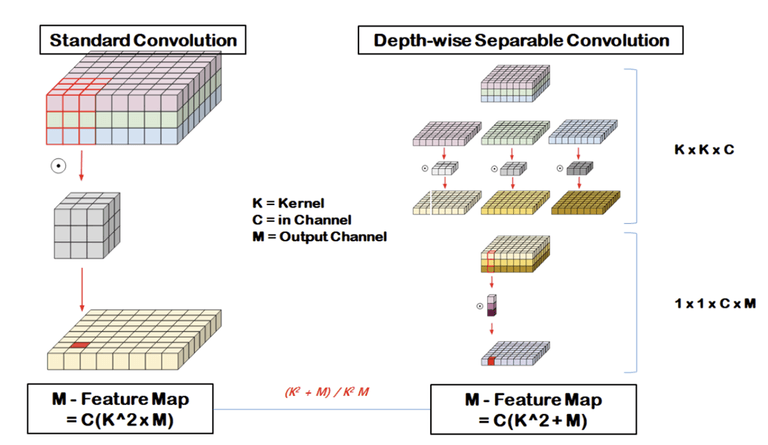
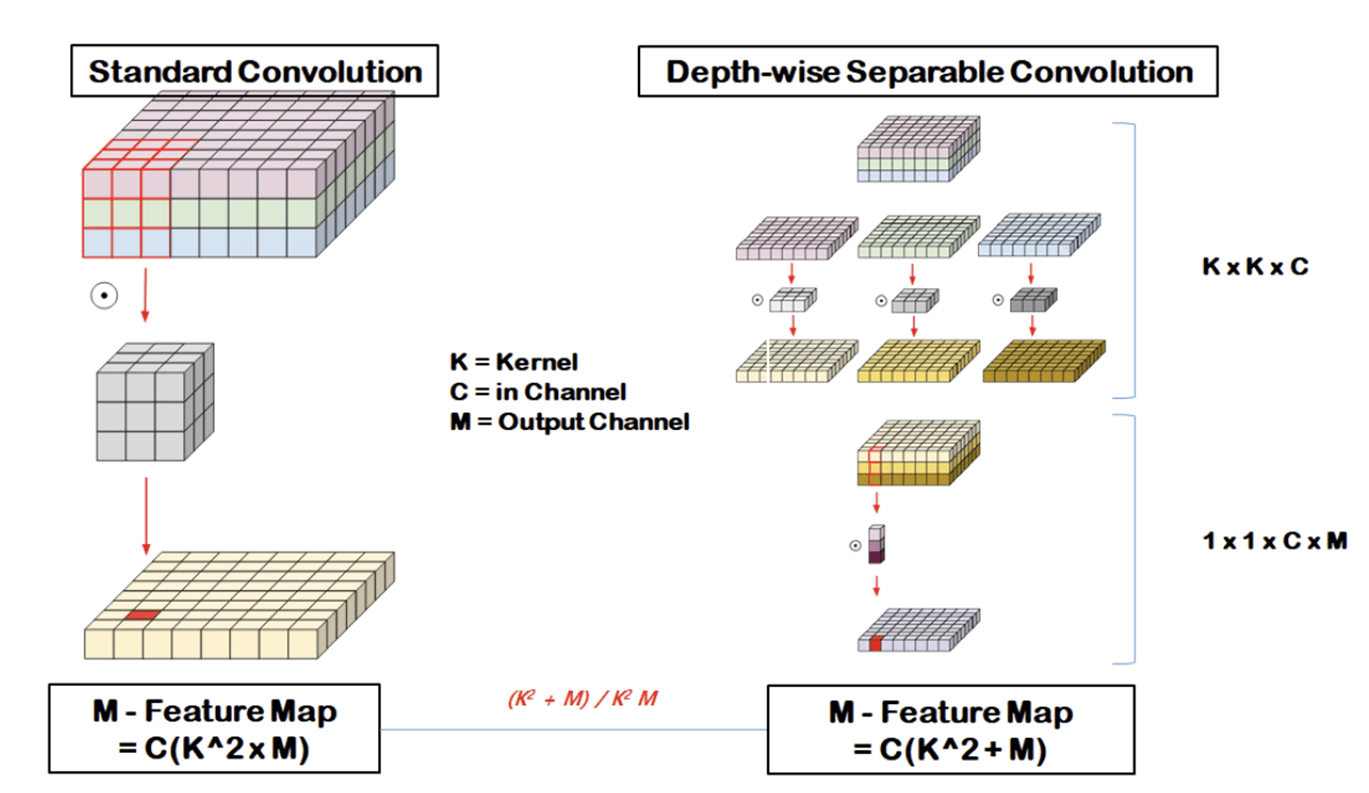
Depthwise Seperable Convolution
-
Depthwise + Pointwise Convolution으로 구성
-
Depthwise는 각 채널 마다 따로 Convolution을 진행
- Output 채널 수 : N, Input 채널 수 : M
- 기존 : (33M) * N
- Depthwise: (33M), PointWise : (11M*N)
-
-
Inverted Residual
- Bottleneck 구조를 반대로 사용 narrow → wide → narrow
- narrow에 해당하는 layer에 중요한 정보가 압축되어 있다는 가정
- 따라서 skip connection 사용 시 더 중요한 정보를 전달 가능 + 메모리 용량
모델 구현 및 학습 with CIFAR10
© 2023 Sangyun Lee, Powered By Gatsby.